
奥比中光双目摄像头AstraPro利用双目成像原理,可以很方便的采集深度图像。下面介绍再Windows平台使用OpenNI2、OpenCV2采集奥比中光双目摄像头AstraPro的深度图RGB彩色图和点云数据的大概操作。
软件安装准备
- 安装摄像头的驱动,下载地址:https://orbbec3d.com/develop/#windows,这里要注意的是要选择操作系统位数对应的版本,32为操作系统选择x86版本,64为系统选择x64版本,否则会出现不兼容问题
- 下载最新OpenNI
- 下载OpenCV2.4及以上版本:https://opencv.org/releases/,其中还用到了TBB,不想自己编译的话,可以用这个编译好的包:https://download.csdn.net/download/rlanffy/11929225
- 安装Visual Studio 2019
创建项目、系统配置
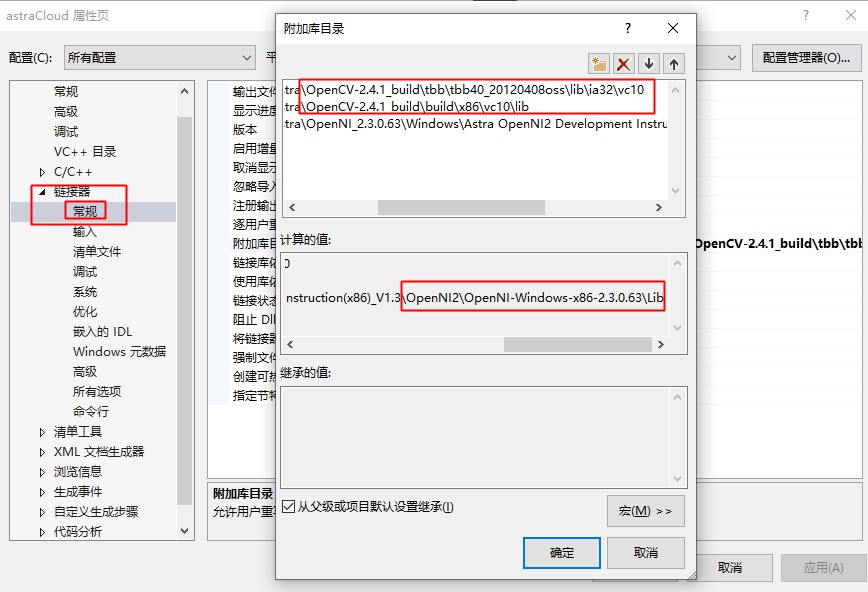
在VisualStudio中创建项目,并做如下的配置:
-
引用头文件和源码
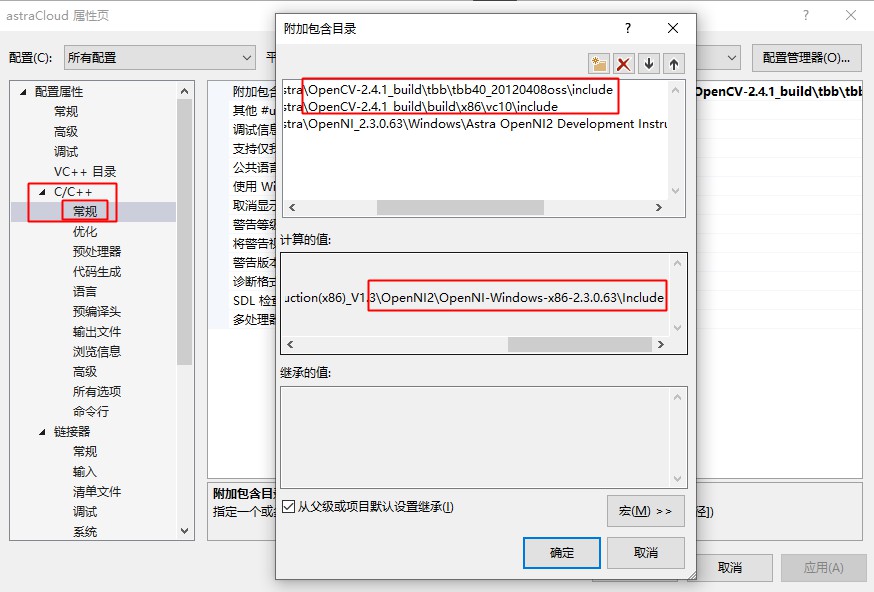
-
引用包
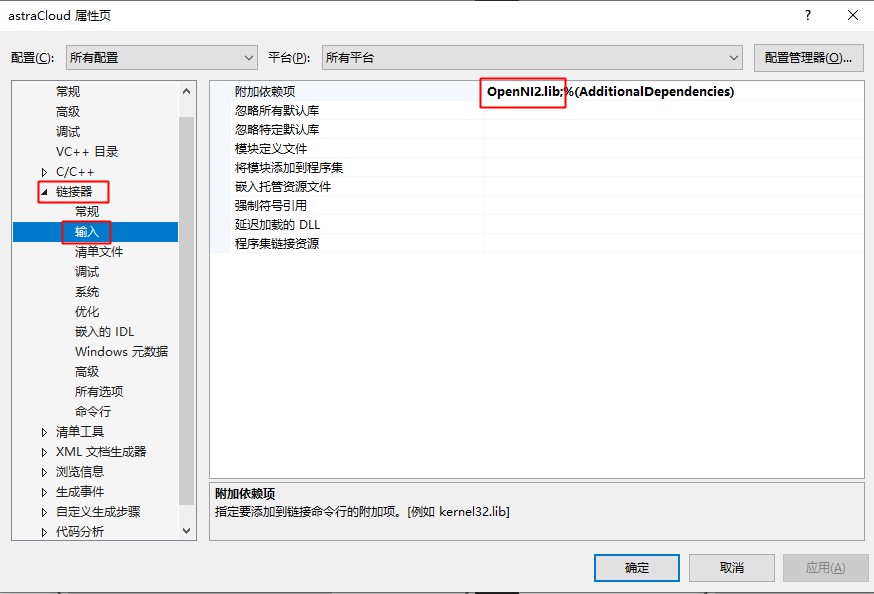
-
附加依赖项
编写采集代码
大致的思路是:
- 识别设备
- 初始化OpenNI环境,打开设备
- 打开深度摄像头,初始化配置
- 打开RGB摄像头,初始化配置
- 将两个摄像头对齐
- 不断循环从深度摄像头的Stream采集图像,显示到指定的窗口中
- 不断循环,从RGB摄像头的Stream中采集图像, 显示到执行的窗口中
- 按下指定按键,采集点云数据,保存彩色图像
- 按下ESC,退出程序
代码详见:https://github.com/lanffy/VideoDataCapturer
代码中的注释有详细的讲解。
点云数据的处理
采集的点云数据在应用中被用来计算采集对象的尺寸,一般使用CloudCompare来处理点云数据,标注数据,测量尺寸。